

로버트 웨단 (Robert Wedan), TI 테크니컬 마케팅 엔지니어
가정과 사무실을 위한 개방형 평면도의 부상과 하이브리드차 및 전기차로의 전환으로 인해 더 조용하고 효율적인 모터 제어에 대한 수요가 크게 증가하고 있다. 음향의 차이가 가장 작은 경우에도 가청 잡음(audible noise)에 큰 차이가 있을 수 있다.
그림 1에서는 생활 공간의 가전 제품들이 전반적인 소음에 어느 정도 수준으로 기여하는지 볼 수 있습니다. 첨단 실시간 제어 기술을 사용하면 더 높은 전력 밀도와 통합, 그리고 더 효율적인 시스템을 통해 모터 제어 회로와 같은 시스템에서 더 나은 음향 성능을 달성할 수 있다. 추가로 취할 수 있는 전략으로는 연속 PWM(펄스 폭 변조, pulse-width modulation)을 사용한 FOC(벡터 자속 기준 제어, field-oriented control) 알고리즘, 진동을 줄이기 위한 특정 제어 알고리즘, 데드 타임 보상 및 가청 잡음을 줄이기 위한 PWM 생성 통합 제어 등이 포함된다.

그림 1: 개방형 주방 및 거실에서 발생하는 가청 잡음
모션 제어 응용 분야에서 가청 잡음을 줄이기 위한 다양한 제품 및 전략 사이에서 현재 설계하고 있는 애플리케이션에 어떤 전략이 가장 적합한지 판단하기 어려울 수 있다. 이 기사에서는 BLDC 통합 제어 게이트 드라이버를 예시로 사용하여 모션 제어 애플리케이션에서 가청 잡음을 줄이는 세 가지 방법을 살펴볼 예정이다.
모션 제어 기술원고 시리즈
![]() 모션 제어 기술원고 시리즈의 첫 번째 콘텐츠 읽어보기: “산업용 드라이브에서 정밀한 모션 제어를 달성하는 방법”
모션 제어 기술원고 시리즈의 첫 번째 콘텐츠 읽어보기: “산업용 드라이브에서 정밀한 모션 제어를 달성하는 방법”
PWM
모션 제어 애플리케이션에서 가청 잡음을 줄이기 위해 취할 수 있는 첫 번째 전략은 연속 PWM이다. PWM은 트랜지스터를 켜고 꺼서 출력 파형을 생성하여 특정 시간에 모터 전압이 높이거나 낮추는 기술이다. 그런 다음 모터의 인덕턴스는 이러한 파형을 필터링하므로써 출력 파형을 평균화한다. 듀티 사이클(파형이 켜진 시간과 꺼진 시간의 비율)을 조정하면 평균 전압이 변경된다. 그림 2 는 PWM을 사용하는 사인파(sinewave) 생성의 예를 보여준다.

그림 2: PWM을 사용해 생성한 사인파 예시
예를 들어, TI의 MCF8315A BLDC 통합 제어 게이트 드라이버인 무센서 FOC 모터 드라이버는 연속 및 불연속 공간 벡터 PWM 기법을 구현한다. 연속 변조는 인덕턴스가 낮은 모터의 전류 리플을 줄이는 데 도움이 되지만, 3상이 모두 스위칭하기 때문에 스위칭 손실이 더 높다. 불연속 변조는 스위칭 손실이 낮지만(한 번에 2상 스위칭만 있으므로) 전류 리플이 더 높다. 그림 3과 4에서 연속 PWM과 불연속 PWM의 차이점을 볼 수 있다.
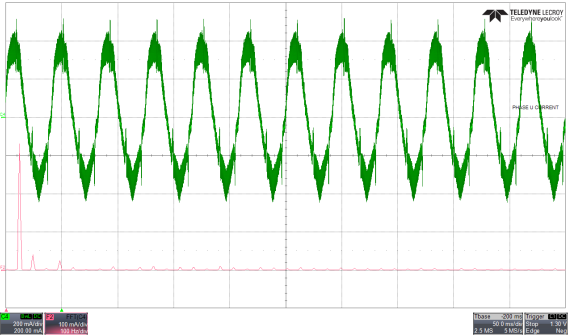
그림 3: 위상 전류 파형 및 고속 푸리에 변환(FFT) 불연속 PWM
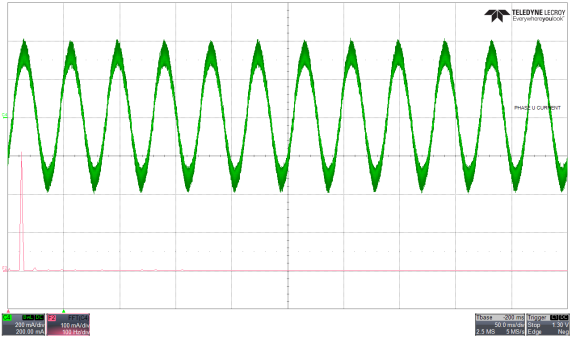
그림 4: 위상 전류 파형 및 FFT 연속 PWM
데드 타임 보상
모션 제어 애플리케이션에서 가청 잡음을 줄이기 위해 사용되는 두 번째 전략은 데드 타임 보상이다. 모터 제어 애플리케이션에서 하프 브리지에 고압측과 저압측 금속 산화막 반도체 전계 효과 트랜지스터 스위칭 사이에 데드 타임을 삽입하면 슛스루 조건을 방지할 수 있다. 데드 타임을 삽입한 후에는 위상 노드에서 예상 전압과 적용 전압이 서로 다르고, 위상 노드 전압은 위상 전류에 원치 않는 왜곡을 발생시켜 가청 잡음을 유발한다.
이러한 추가 잡음을 관리하기 위해 엔지니어는 공진 컨트롤러를 사용하여 데드 타임 보상을 통합하여 위상 전류의 고조파 부품을 제어할 수 있으므로 그림 5 와 같이 데드 타임으로 인한 전류 왜곡을 완화할 수 있다.
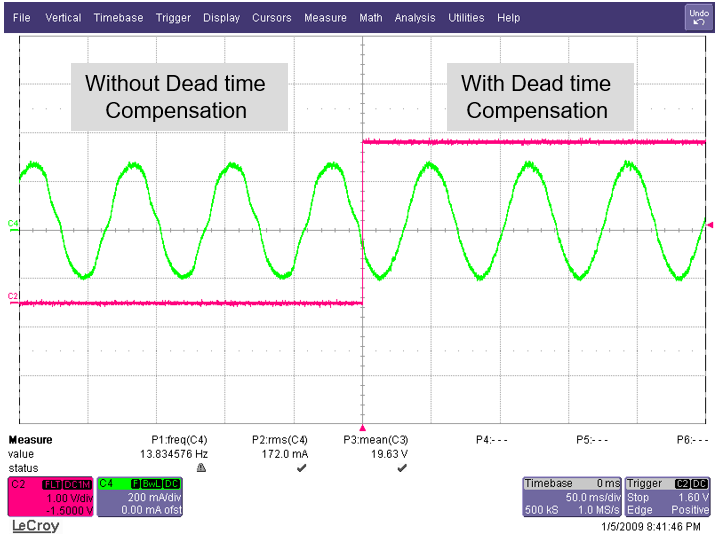
그림 5: 무센서 FOC 데드 타임 보상 분석
예를 들어, TI의 MCF8316A BLDC 통합 제어 게이트 드라이버인 무센서 FOC 모터 드라이버는 이 내장 기능을 사용하여 그림 6 과 같이 여러 전기 속도에서 음향을 최적화한다.

그림 6: MCF8316A 음향 최적화를 위해 구현된 PWM 변조 및 데드 타임 보상
가변 정류 모드
모션 제어 애플리케이션에서 가청 잡음을 줄이기 위한 마지막 기법은 가변 정류 모드다. 사다리꼴 정류에는 120도와 150도의 두 가지 주요 구성이 있다. 사다리꼴 120도는 긴 고임피던스 기간으로 인해 토크 리플이 증가하기 때문에 더 많은 음향 잡음이 발생할 수 있다(그림 7 및 8 참조). 그리고 사다리꼴 150도는 제로 크로싱을 감지하는 작은 창문을 통해 저속에서만 작동할 수 있다.
이러한 문제를 해결하고 음향 성능을 개선하기 위해 엔지니어는 사다리꼴 120도와 사다리꼴 150도 사이에서 동적으로 전환할 수 있는 모터 드라이버 시스템을 제작할 수 있다. 이러한 동적 변조는 BLDC 모터 제어 중에 전반적인 음향 성능을 개선할 수 있다.
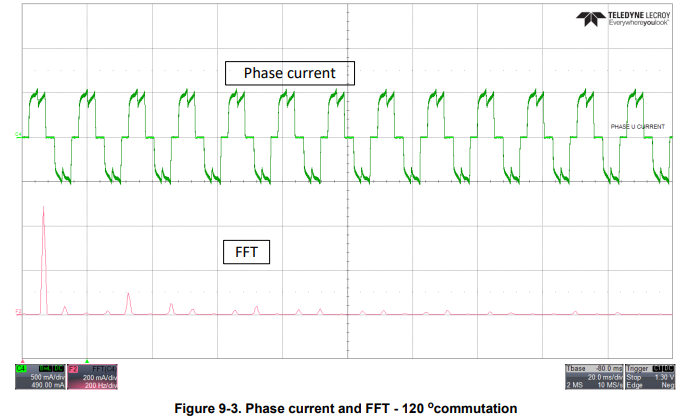
그림 8: 위상 전류 및 FFT – 120도 전류
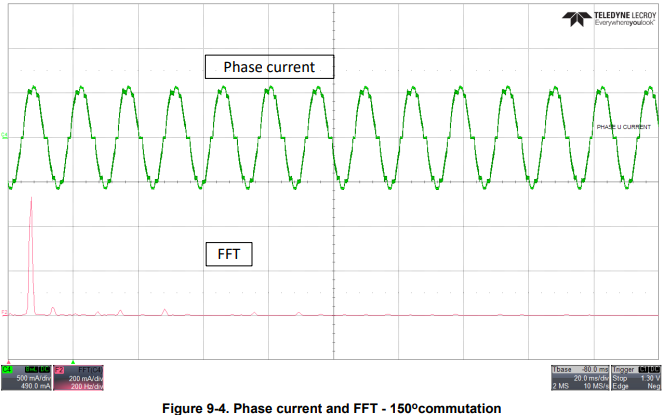
그림 8: 위상 전류 및 FFT – 150도 전류
예를 들어 MCT8329, MCT8316 같은 TI의 무센서 BLDC 통합 사다리꼴 제어 게이트 드라이버는 그림 9 와 같이 이 내장 기능을 사용하여 여러 전기 속도에서 음향을 최적화한다.
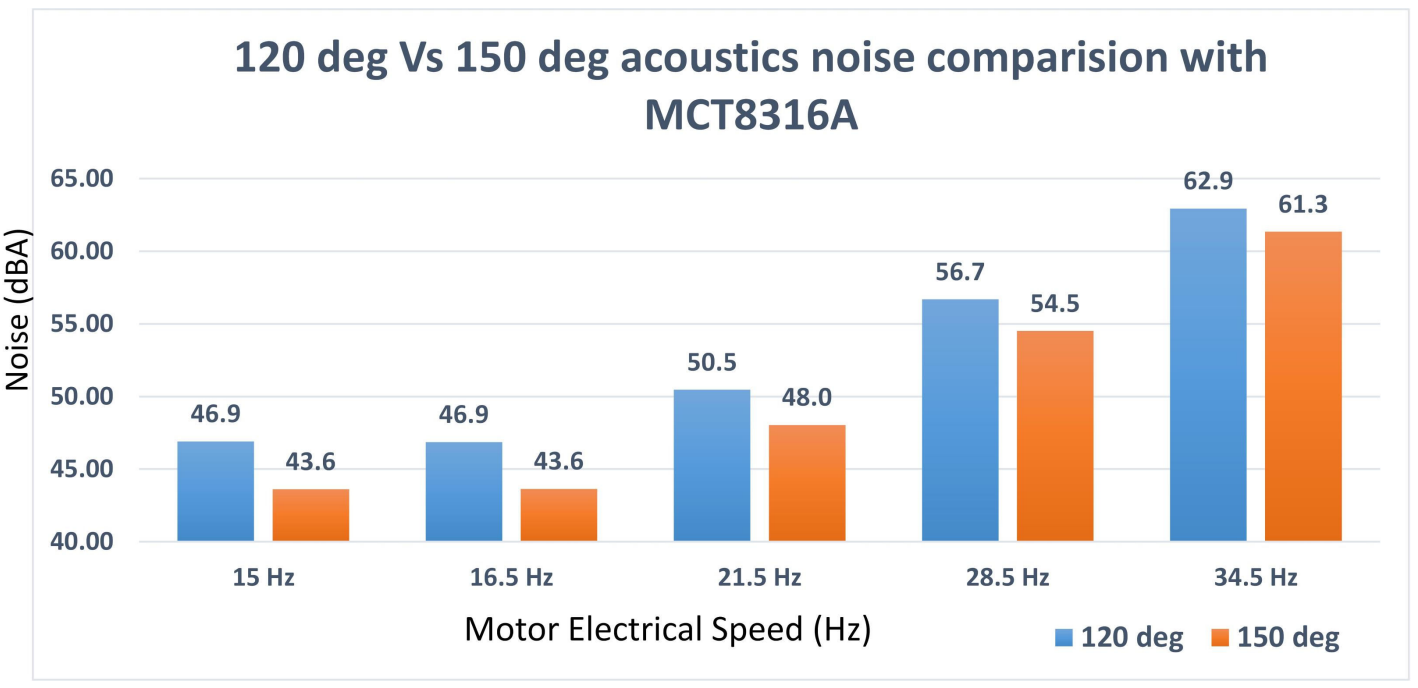
그림 9: MCT8316A 음향 최적화를 위해 구현된 동적 변조 방식의 가변 정류 모드
결론
TI는 음향 요구 사항을 충족하도록 설계된 기본 구성 요소를 통해 더 효율적이고 음향에 민감한 시스템을 구축할 수 있도록 모션 제어 기술에 투자하고 있다. 시스템을 설계할 때 이러한 세 가지 주요 방법을 통해 모션 제어 애플리케이션에서 가청 잡음을 줄일 수 있다.
추가 자료
- [애플리케이션 리포트] “코드 없는 무센서 BLDC 모터 드라이버로 모터 잡음을 줄이는 방법”
- [동영상 자료] “BLDC 모터 드라이버로 가청 모터 잡음을 줄이는 방법”
- 통합 제어 BLDC 드라이버
- BLDC 모터 드라이버
- Arm® 기반 프로세서
- C2000 실시간 마이크로컨트롤러
- MSP430 마이크로컨트롤러
(원문보기)
